转自http://blog.csdn/ty101/article/details/8905394
本文的PDF版本,以及涉及到的所有文献和代码可以到下列地址下载:
1、PDF版本以及文献:
2、原作者的MATLAB代码:
LBP一种用来描述图像纹理特征的算子,该算子由芬兰奥卢大学的T.Ojala等人在1996年提出[1],在2002年时,Timo Ojala等人在PAMI上又发表了一篇关于LBP的文章[2],该文章非常清楚的阐述了多分辨率、灰度尺度不变和旋转不变、等价模式的改进的LBP特征。LBP的核心思想就是:以中心像素的灰度值作为阈值,与他的领域相比较得到相对应的二进制码来表示局部纹理特征。呃,这句话实在有些拗口-_-#还是举例吧,下面我们从最简单的入手,一步一步讲解整个LBP特征(整个LBP特征提取流程请看文章最后的appendix)。
l 初级的LBP计算方法(先撇开多分辨率、灰度尺度不变、旋转不变^_^)
假设我们有一个3*3的窗口,窗口内的值代表每个像素的灰度值,如下所示:
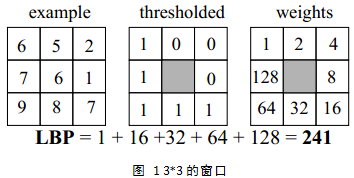
可以看到中心像素点的灰度值为6,我们将这个中心像素点的灰度值与它周围8领域的像素值大小做比较,也就是说我们将7、9、8、7、1、2、5、6这8个数字分别与6做比较,大于6,我们则把右边相应的方格置为1,小于6则置为0。之后我们就得右边的窗口,我们按逆时针方向把这些1和0连起来就得到了所谓的LBP模式:11110001(注意是二进制的),然后将这个数转换为10进制,也就是241。
Tips:扩展后的LBP中的窗口形状
上面所说的版本是Timo Ojala在1996年提出的,在2002年的时候Timo Ojala在PAMI上的文章对上述进行了拓展。拓展后的算法可以设置邻域和半径的属性,用P来表示邻域像素点个数,用R来表示半径,上面我们描述的初级版本就是P=8,R=1.0的版本(不考虑插值,后面会详细描述)。下图描述了P,R取不同值时的情形:
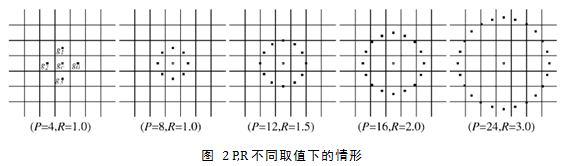
注意初级版本[1]的领域是没有表现出插值的思想的(也就是方形邻域),而2002年的PAMI文章[2]是圆形邻域,是涉及到插值的(可以看出,只有对角线的像素需要插值)。其实将方形窗口换成圆形窗口也有利于后面的旋转不变性的实现,后面会详细描述。
Tips:关于LBP的亮度变化鲁棒性以及灰度尺度不变
灰度尺度不变其实很好理解,我们依旧用图1为例子,我们将亮度放大10倍:
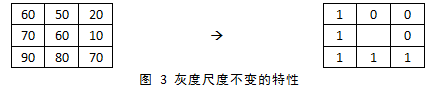
可以看到,灰度尺度的变换并没有对最后的局部二值模式产生影响,同样的道理,即使该窗口的9个像素的灰度值出现了亮度的非线性变换,只要中心像素的灰度值与8邻域内像素的灰度值的大小关系不变,那么最终产生的LBP特征就不会改变。但是请注意:要是亮度变换后,中心像素灰度值与周围像素的灰度值大小关系与变换前不一样,那么LBP特征就会随之改变了。例如,图1中的窗口,亮度进行了一次非线性的变化,结果为:

可以看出,右边的局部二值模式已经和图1中的局部二值模式不一样了。
为LBP算子加入旋转不变性
在2000年Pietikinen等人在文章 [3] 中描述了如何扩展LBP特征,使之具备旋转不变性。下面我们以一个P=8,R=1.0的圆形窗口作为例子,讲解LBP算子的旋转不变性。令中心点的灰度值为gc,8邻域内的8个像素灰度值分别为gi={g0,g1,…,g7},当图像发生旋转时,圆形邻域内的灰度值gi是在以gc为中心R为半径的圆周上运动的。例如我们有一个这样的窗口:
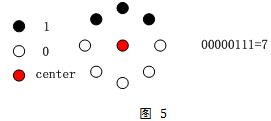
那么把图像逆时针旋转每次45度,枚举出所有可能的取值,得到如下结果:
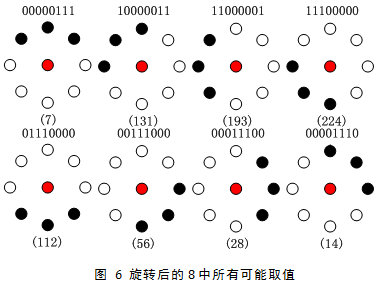
我们可以发现,只要我们取上述枚举出来的值的最小值,就可以消除旋转带来的影响。例如我们得到一个二进制的LBP值10000011(也就是原图逆时针旋转45度),然后不断对这个二进制进行向右循环移位(加上它本身,总共有8种取值可能),之后取最小结果就是该窗口的LBP值。
Tips:旋转不变的LBP特征也起到了一定的特征将维作用
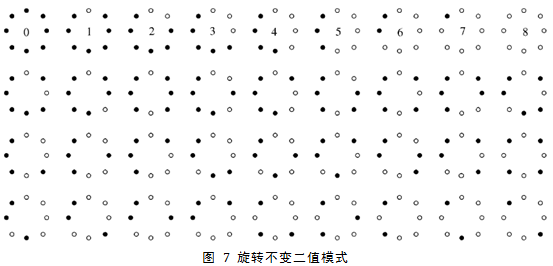
当p=8,R=1.0的时候,最终会有2^p=2^8=256种取值可能,而旋转不变的LBP特征只会存在36种旋转不变的二值模式:
l 利用等价模式来提高旋转不变性
加入了旋转不变性后是不是就万事大吉了呢?其实不是,后来T.Ojala发现效果并不是很好,因为当我们把P和R值取很大时,也就意味着得到的局部二值模式二进制的位数会非常大(P和 R取值越大,邻域内的像素就越多,T.Ojala在论文[2]中已经给出,P的取值为24),这样一来,最后产生的直方图就非常稀疏,不利于分类。而如果p和r取值太小的话,就会使角度的分割精度降低,从而使得后面的分类性能降低。为了解决这些问题,T.Ojala等人在文献[2]中提出了一种叫“等价模式”的方法来降低LBP特征的维数。T.Ojala等人发现,有一类模式在图像中出现的频率及其高,这类模式就是等价模式,它们都有一个特性,就是黑白跳变数量都小于等于2(在图 7中的第一行即为等价模式,其他都为非等价模式)。另外我们也可以推出,在P邻域中,等价模式的个数U为:U=P*(P-1)+2,其他模式都称为非等价模式。等价模式的LBP值就等于二值编码中1的个数,非等价模式的LBP值为P+1,用公式来表示就是:

其中U(LBPp,R)<=2 就表示0,1跳变次数小于等于2。尽管等价模式只占了全部模式的一小部分,但是T.Ojala表明这一小部分等价模式能够刻画90%以上的纹理特征。
l 关于LBP支持多分辨率的分析
我们在图2中可以看出,只要不断改变P和R的大小(即图像处理中常用的所谓“窗口大小”的概念),即可以让LBP具有多分辨率识别的特性,还有一种常见的方法是不改变P和R的大小,而是将图像按某一因子缩放,T.Ojala在会议论文[4]中提出,根据他们实验得出使用前一种方法(及改变窗口大小而非scale图片)会得到更好的效果。当如在[4]在,T.Ojala等人还提出将图像的灰度直方图和LBP特征结合来增强分类的效果,具体的内容可以参考Texture Classification byMulti-Predicate Local Binary Pattern Operators这篇文章^_^。
下面是一些关于LBP“原汁原味”的文章,多看看原作者的文章才是王道,呵呵。
参考文献:
[1]T.Ojala, M.Pietikinen et al. A Comparative Study of Texture Measures with Classification based on Feature Distribution. Pattern Recognition. 1996. Vol.29.pp.51-59.
[2]T.Ojala, M.Pietikinen. Multiresolution Gray-Scale and Rotation InvariantTexture Classification with Local Binary Patterns. Pattern analysis and MachineIntelligence. Vol.24.7.pp.971-986
[3]M.Pietikinen, T.Ojala, and Z.Xu. Rotation-Invariant Texture ClassificationUsing Feature Distributions. Pattern Recognition. 2000. Vol.33.pp.43-52.
[4] T.Maenpaa , M. Pietikinen, and T. Ojala, “Texture Classification byMulti-Predicate Local Binary Pattern Operators,” Proc. 15th Int'l Conf.Pattern Recognition, vol. 3, pp. 951-954, 2000.
Appendix:LBP特征提取流程图

本文的PDF版本,以及涉及到的所有文献和代码可以到下列地址下载:
1、PDF版本以及文献:
2、原作者的MATLAB代码:
LBP一种用来描述图像纹理特征的算子,该算子由芬兰奥卢大学的T.Ojala等人在1996年提出[1],在2002年时,Timo Ojala等人在PAMI上又发表了一篇关于LBP的文章[2],该文章非常清楚的阐述了多分辨率、灰度尺度不变和旋转不变、等价模式的改进的LBP特征。LBP的核心思想就是:以中心像素的灰度值作为阈值,与他的领域相比较得到相对应的二进制码来表示局部纹理特征。呃,这句话实在有些拗口-_-#还是举例吧,下面我们从最简单的入手,一步一步讲解整个LBP特征(整个LBP特征提取流程请看文章最后的appendix)。
l 初级的LBP计算方法(先撇开多分辨率、灰度尺度不变、旋转不变^_^)
假设我们有一个3*3的窗口,窗口内的值代表每个像素的灰度值,如下所示:
可以看到中心像素点的灰度值为6,我们将这个中心像素点的灰度值与它周围8领域的像素值大小做比较,也就是说我们将7、9、8、7、1、2、5、6这8个数字分别与6做比较,大于6,我们则把右边相应的方格置为1,小于6则置为0。之后我们就得右边的窗口,我们按逆时针方向把这些1和0连起来就得到了所谓的LBP模式:11110001(注意是二进制的),然后将这个数转换为10进制,也就是241。
Tips:扩展后的LBP中的窗口形状
上面所说的版本是Timo Ojala在1996年提出的,在2002年的时候Timo Ojala在PAMI上的文章对上述算法进行了拓展。拓展后的算法可以设置邻域和半径的属性,用P来表示邻域像素点个数,用R来表示半径,上面我们描述的初级版本就是P=8,R=1.0的版本(不考虑插值,后面会详细描述)。下图描述了P,R取不同值时的情形:
注意初级版本[1]的领域是没有表现出插值的思想的(也就是方形邻域),而2002年的PAMI文章[2]是圆形邻域,是涉及到插值的(可以看出,只有对角线的像素需要插值)。其实将方形窗口换成圆形窗口也有利于后面的旋转不变性的实现,后面会详细描述。
Tips:关于LBP的亮度变化鲁棒性以及灰度尺度不变
灰度尺度不变其实很好理解,我们依旧用图1为例子,我们将亮度放大10倍:
可以看到,灰度尺度的变换并没有对最后的局部二值模式产生影响,同样的道理,即使该窗口的9个像素的灰度值出现了亮度的非线性变换,只要中心像素的灰度值与8邻域内像素的灰度值的大小关系不变,那么最终产生的LBP特征就不会改变。但是请注意:要是亮度变换后,中心像素灰度值与周围像素的灰度值大小关系与变换前不一样,那么LBP特征就会随之改变了。例如,图1中的窗口,亮度进行了一次非线性的变化,结果为:
可以看出,右边的局部二值模式已经和图1中的局部二值模式不一样了。
为LBP算子加入旋转不变性
在2000年Pietikinen等人在文章 [3] 中描述了如何扩展LBP特征,使之具备旋转不变性。下面我们以一个P=8,R=1.0的圆形窗口作为例子,讲解LBP算子的旋转不变性。令中心点的灰度值为gc,8邻域内的8个像素灰度值分别为gi={g0,g1,…,g7},当图像发生旋转时,圆形邻域内的灰度值gi是在以gc为中心R为半径的圆周上运动的。例如我们有一个这样的窗口:
那么把图像逆时针旋转每次45度,枚举出所有可能的取值,得到如下结果:
我们可以发现,只要我们取上述枚举出来的值的最小值,就可以消除旋转带来的影响。例如我们得到一个二进制的LBP值10000011(也就是原图逆时针旋转45度),然后不断对这个二进制进行向右循环移位(加上它本身,总共有8种取值可能),之后取最小结果就是该窗口的LBP值。
Tips:旋转不变的LBP特征也起到了一定的特征将维作用
当p=8,R=1.0的时候,最终会有2^p=2^8=256种取值可能,而旋转不变的LBP特征只会存在36种旋转不变的二值模式:
l 利用等价模式来提高旋转不变性
加入了旋转不变性后是不是就万事大吉了呢?其实不是,后来T.Ojala发现效果并不是很好,因为当我们把P和R值取很大时,也就意味着得到的局部二值模式二进制的位数会非常大(P和 R取值越大,邻域内的像素就越多,T.Ojala在论文[2]中已经给出,P的取值为24),这样一来,最后产生的直方图就非常稀疏,不利于分类。而如果p和r取值太小的话,就会使角度的分割精度降低,从而使得后面的分类性能降低。为了解决这些问题,T.Ojala等人在文献[2]中提出了一种叫“等价模式”的方法来降低LBP特征的维数。T.Ojala等人发现,有一类模式在图像中出现的频率及其高,这类模式就是等价模式,它们都有一个特性,就是黑白跳变数量都小于等于2(在图 7中的第一行即为等价模式,其他都为非等价模式)。另外我们也可以推出,在P邻域中,等价模式的个数U为:U=P*(P-1)+2,其他模式都称为非等价模式。等价模式的LBP值就等于二值编码中1的个数,非等价模式的LBP值为P+1,用公式来表示就是:
其中U(LBPp,R)<=2 就表示0,1跳变次数小于等于2。尽管等价模式只占了全部模式的一小部分,但是T.Ojala表明这一小部分等价模式能够刻画90%以上的纹理特征。
l 关于LBP支持多分辨率的分析
我们在图2中可以看出,只要不断改变P和R的大小(即图像处理中常用的所谓“窗口大小”的概念),即可以让LBP具有多分辨率识别的特性,还有一种常见的方法是不改变P和R的大小,而是将图像按某一因子缩放,T.Ojala在会议论文[4]中提出,根据他们实验得出使用前一种方法(及改变窗口大小而非scale图片)会得到更好的效果。当如在[4]在,T.Ojala等人还提出将图像的灰度直方图和LBP特征结合来增强分类的效果,具体的内容可以参考Texture Classification byMulti-Predicate Local Binary Pattern Operators这篇文章^_^。
下面是一些关于LBP“原汁原味”的文章,多看看原作者的文章才是王道,呵呵。
参考文献:
[1]T.Ojala, M.Pietikinen et al. A Comparative Study of Texture Measures with Classification based on Feature Distribution. Pattern Recognition. 1996. Vol.29.pp.51-59.
[2]T.Ojala, M.Pietikinen. Multiresolution Gray-Scale and Rotation InvariantTexture Classification with Local Binary Patterns. Pattern analysis and MachineIntelligence. Vol.24.7.pp.971-986
[3]M.Pietikinen, T.Ojala, and Z.Xu. Rotation-Invariant Texture ClassificationUsing Feature Distributions. Pattern Recognition. 2000. Vol.33.pp.43-52.
[4] T.Maenpaa , M. Pietikinen, and T. Ojala, “Texture Classification byMulti-Predicate Local Binary Pattern Operators,” Proc. 15th Int'l Conf.Pattern Recognition, vol. 3, pp. 951-954, 2000.
Appendix:LBP特征提取流程图